|
|
|
|

 Něco k modelům Něco k modelůmVydáno dne 15. 08. 2008 (359 přečtení) jak na otáčení dělových věží na maketě lodi 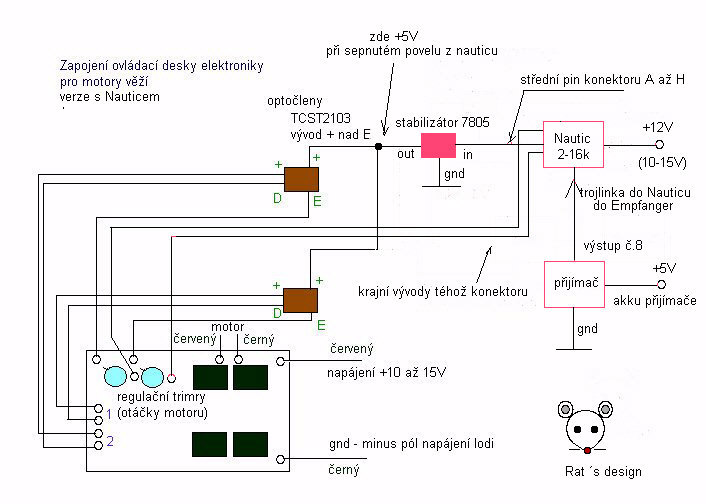
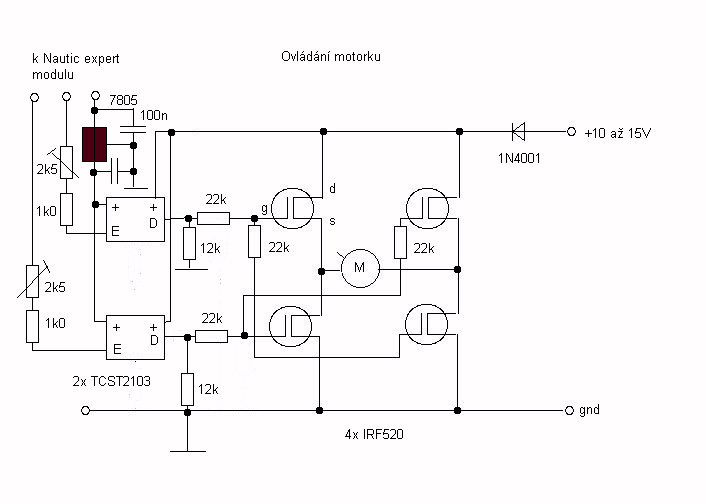
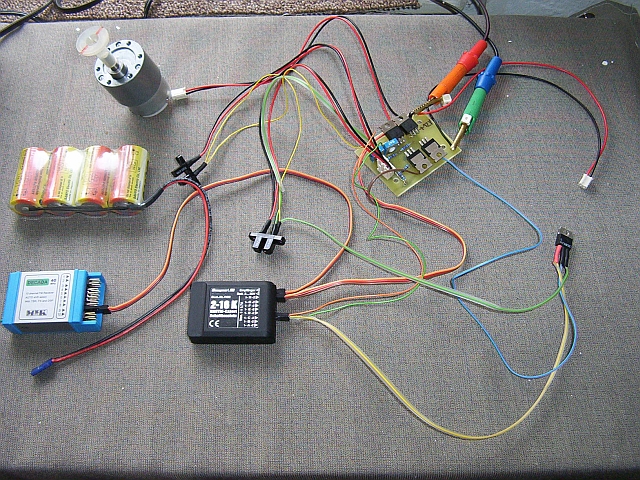
modelařením se nezabývám. Šlo o problém s otáčením dělových věží na modelu lodi. Původní provedení totiž obsahovalo relátek asi jako dřívější telefonní ústředna a podobný počet různých spínačů a mikrospínačů doplněných obyčejně servy. Ke všemu tu ale byl další problém: použité motorky byly na 12V a točily se tedy příliš rychle (i s napájením 5V). Požadavek navíc tedy byl, aby k otočení věže o 180 stupňů došlo tak za 20-30 vteřin. Protože, jak se zdálo, žádný popis či návod žadatel neměl, musel jsem něco vymyslet sám. Řešení to možná není zcela ideální, ale za to je funkční a rozhodně váhově lehčí, jak řady relé. Původní zapojení tedy pracovalo tak, že servo seplo spínač, ten nějaké relé a to pak motor, který měl doběhové spínače (aby se to neprotočilo dokola). Zkusil jsem tedy navrhnout v první fázi zapojení, které by vyřadilo aspoň ty doběhové spínače a dovolilo nastavit rychlosti otáčení v obou směrech individuálně a to logicky i pro každý motor, neb všechny nemusí být zcela stejné a nemusí pracovat do stejného mechanického odporu, že. Především jsem zjistil, že uvedený motor se točí už při napětí od asi 1,7V a má i tak velkou sílu, neb je přes převodovku. S napětím tak kolem 2V pak lze dosáhnout těch asi 20 vteřin. Jenže: to napětí jednak nesmí kolísat, druhak nemůže být přivedeno např. přes odpor, neb to se tedy motorku nelíbilo a odmítal se rozběhnout. Přepínání jsem tedy vyřešil čtveřicí fetů IRF520 (zde zbytečně předimenzované, ale byly "po ruce" - jinak by měly jít použít i IRFU24N nebo možná i BS170). Motorek bere proud v desítkách mA, takže fety není potřeba chladit (myslím mnou použitý motorek, viz foto). Fety jsou sice zatíženy nesymetricky (na horních je větší výkon), ale to ničemu nevadí. (To je dáno rozdílným napětím na gate oproti zemi u "horního" a "dolního" fetu.) Poněkud podivné zapojení odporů v gate, kde odpory z fetů vpravo vedou na gate těch vlevo místo aby vedly na optočlen je dáno spíše mojí chybou na desce, ale neměnil jsem to, neb "co funguje, to neopravuj" a evidentně se nezdá, že by to čemukoliv vadilo. Fety jsou tedy otevírány "do kříže" fototranzistory v optobranách TCST2103. Ty fungují jako "koncové vypínače", takže jakmile zajede do brány clonka, motor zůstane stát i kdyby povel k otáčení trval! Začne se otáčet pouze po změně povelu k otáčení na opačnou stranu. Pochopitelně je při montáži nutné dát pozor na to, aby se motor otáčel i s clonkou k tomu optočlenu, co ho vypne, nikoli opačně!!! Řízení otáček je dáno osvícením fototranzistoru LED diodou v optobráně. To lze nastavit trimry (seriové odpory 1k0 jsou tu jako ochrana) no a stabilní napětí pro LED je dáno stabilizátorem 7805 (stačil by i 78L05 a to i pro více desek ovládání!). A nyní: buď tedy využijeme stávající části v lodi ve stylu "servo a mikrospínače" a mikrospínači budeme spínat vývody z trimrů na zem (což bude asi platit tam, kde se otáčí jen jedna či dvě věže), nebo použijeme zapojení s modulem Graupner Nautic expert 2-16K. Ten totiž dokáže spínat též proti zemi až 16 výstupů, čili přepínat 8! Protože ale umí pracovat v rozsahu asi 3 až 30V, můžeme ho napájet 12V a stabilizátor pro všechny desky dát až za něj. (Přijímač je ovšem napájen z vlastní baterie - to je poznámka proto, že si nemyslím, že by bylo dobré napájet ho přes stabilizátor 5V společně s dalšími obvody ať by už ten stabilizátor byl kdekoliv.) V zapojení byl pro informaci použit přijímač DECADA od MZK. Poznámka k modulu Nautic: v jeho návodu se sice uvádí, že může spínat až 0,7A na každém výstupu, jenže hned zatím je psáno, že zátěží nesmí být motor! No a když jsem viděl "firemní doplňkovou desku", tak tam bylo co? No správně, zase dvě relé, hi! Pokud byste tedy potřebovali byť i jen pohon motorku bez kontroly doběhu (např. jeřáb, naviják, radar), bude jednodušší použít tuto desku taky a pouze místo optobrány použít (patrně jakýkoliv) běžný optočlen. Zapojení chodilo i s WK16412 od Tesly... Poznámka k optobráně TSCT2103: její označení na pouzdru je poměrně zmatečné, asi na "zmatení nepřítele" či co. Anoda LED diody stejně jako kolektor fototranzistoru je značena "+" - což by nebylo tak hrozné, kdyby katoda nebyla značena "E" a emitor fototranzistoru pro změnu "D"! Proto pozor při zapojení, sám jsem se spletl asi 3x... Desku spoje neuvádím, jednak proto, že ani moje není ideální, ale hlavně proto, že není jasné, jaké součástky použijete a jak malou desku si můžete dovolit (v principu by šlo i SMD!). Problém je hlavně v tom, že když např. navrhnu nějaké konektory "už s drátky", dá se čekat, že v době až budete toto číst, už nebudou k sehnání. Obdobně není moc jasné, jaké motorky a s jakým odběrem použijete, což bude mít zase vliv na použitý typ tranzistorů a zda budou či nebudou potřebovat chlazení. Např. motorek na snímku bere tak 25-45mA ač je veliký až převeliký, přitom zkouška např. s motorkem "do kazeťáku" pro změnu ukázala odběr 300 až 500mA! Přesto doufám, že vám zapojení pomůže k řešení podobných problémů, jako byl tento. 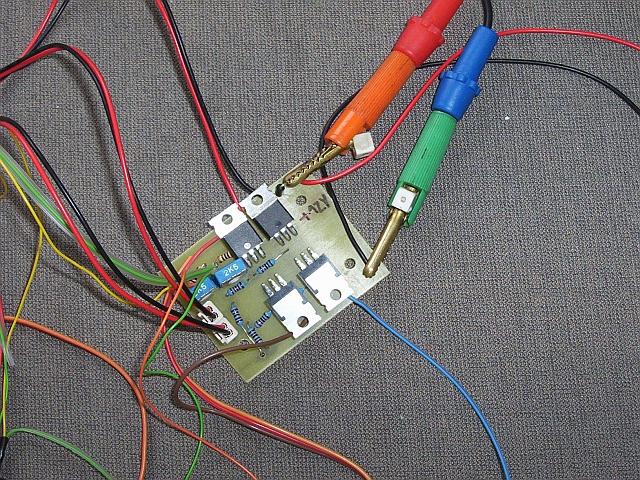
 ( Celý článek | Autor: Krysatec | Počet komentářů: 2 | Přidat komentář | |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Powered by phpRS. Sponsored by benghi.org